
Research Projects
P.S., click the hyperlink title to access the source.
6 DOFs robot positioning system using multisensor fusion
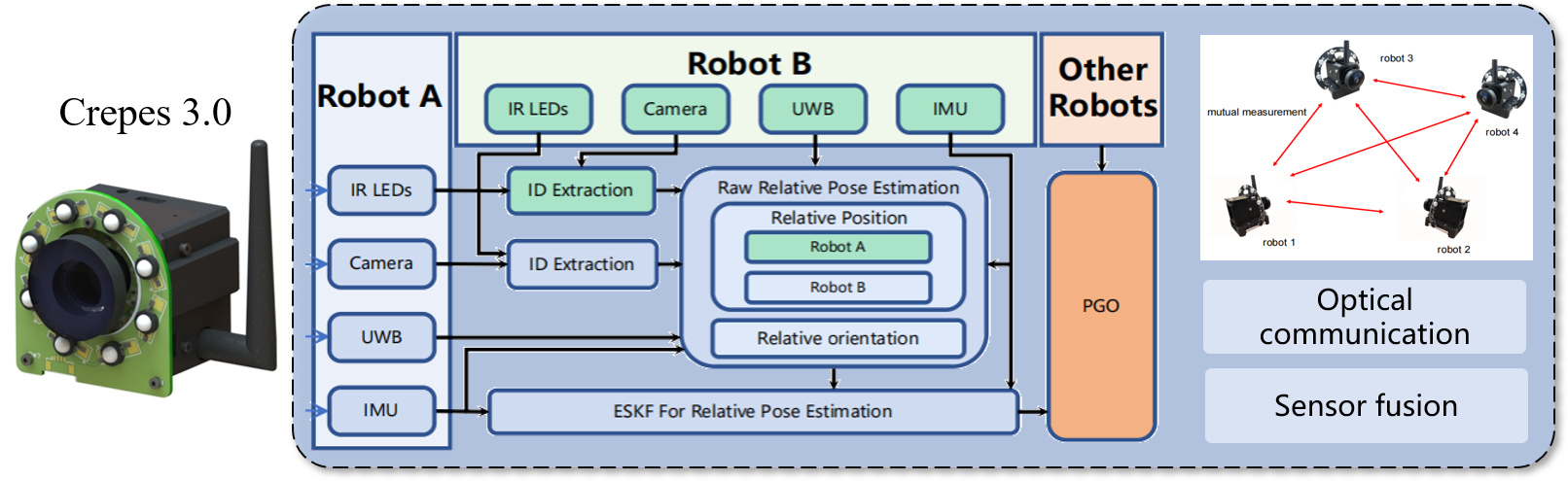
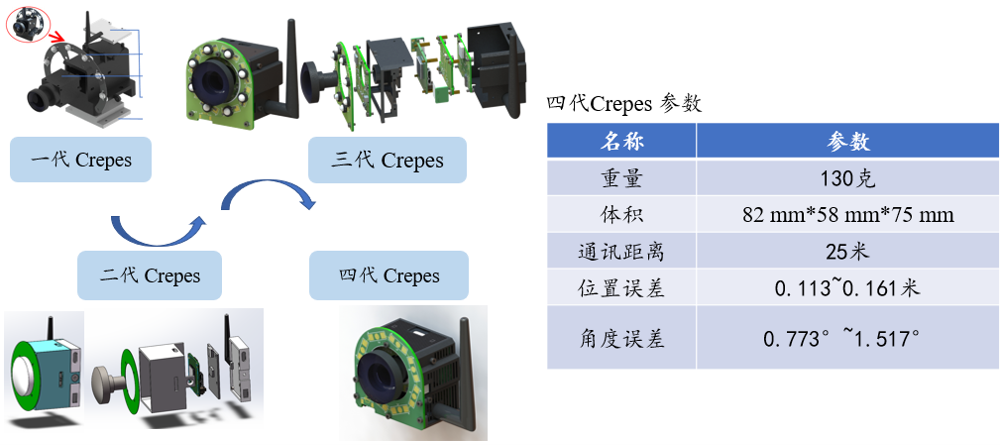
Cooperative Relative Pose Estimation towards Real World Multi Robot Systems (Crepes)
Article: Waiting for publishing
- System architecture:
- System iterations:
Rigid and Flexible Coupled Structures Using A Thin-wall Spring Steel Sheet
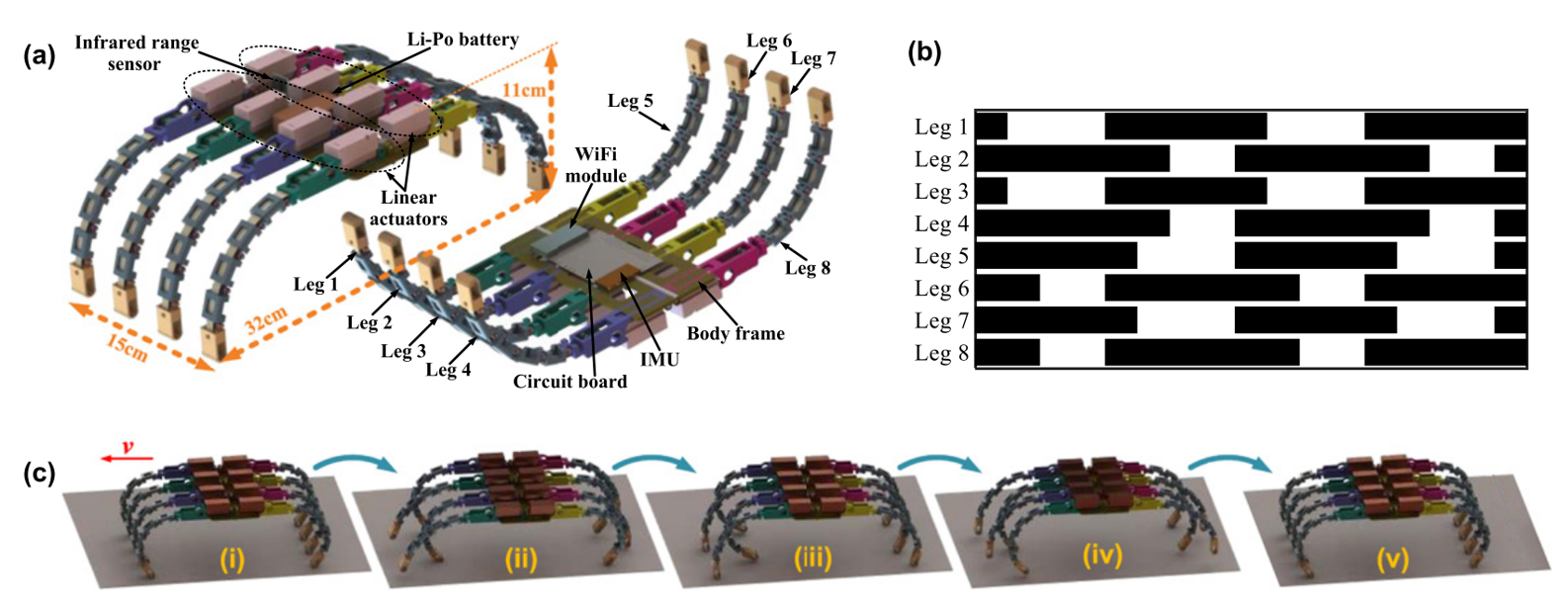
Topic 1: Rigid and flexible coupled structures inspired crab robot
Article: click here
- Structure of the crab robot:
Topic 2: Rigid and flexible coupled robot hand with open loop control
Article: click here
- Video of the conference paper:
Topic 3: Space Continuum Manipulator
- Some simulations:
|
|
|
Hand Posture Detection Using Flexible Sensors (Bachelor)
|
- Measure using JY901
|
-Measure using Flex sensors
|